




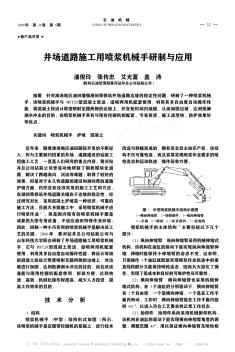
针对滩海地区油田增强潮间带修筑井场道路边坡的稳定性问题,研制了一种喷浆机械手。该喷浆机械手与PBT20型混凝土泵送、湿喷两用机配套使用,利用其多自由度自动操作性能,将混凝土按设计厚度喷射至路两侧的边坡上,并在短时间内凝固,从而加固边坡,达到抵御潮水冲击的目的。该喷浆机械手具有与现有挖掘机相配套、节省投资、施工速度快、防护效果好等优点。

1 一、总体方案设计 1.1 设计任务 基本要求 : 设计一个多自由度机械手(至少要有三个自由度)将最大重量为 40Kg的工件, 由车间的一条流水线搬到别一条线上; 二条流水线的距离为: 1000mm; 工作节拍为: 70s; 工件:最大直径为 160mm 的棒料; 1.2 总体方案确定 1.2.1 自由度 自由度是指机器人所具有的独立坐标轴运动的数目,但是一般不包括手部 (末端操作器) 的开合自由度。 自由度表示了机器人灵活的尺度, 在三维空间中 描述一个物体的位置和姿态需要六个自由度。 机械手的自由度越多,越接近人手的动作机能,其通用性就越好,但是结构 也越复杂,自由度的增加也意味着机械手整体重量的增加。 轻型化与灵活性和抓 取能力是一对矛盾,,此外还要考虑到由此带来的整体结构刚性的降低,在灵活 性和轻量化之间必须做出选择。 工业机器人基于对定位精度和重复定位精度以及 结构刚性的考
德国喷浆机械手介绍相关专题
- 怎样设置德国威乐循环泵
- 有哪些好的德国电缆品牌
- 多玛自动门的德国多玛历史
- 菲仕乐在德国什么价格
- 德国obo防雷器价格是怎样的
- 德国VEMTE减速机价格多少
- 德国柏丽橱柜价格贵不贵
- 德国都芳漆5l能刷多少面积
- 德国洁水的水管要多少钱
- 德国安梦呼吸机价格
- 以色列CQM-换热器自动清洗装置ATCS技术介绍
- 中国火电之五大发电集团地方电厂及所属公司详细介绍
- 公伯峡发电厂房尾水砼悬空带状牛腿梁施工支撑方案介绍
- 广州新白云国际机场旅客航站楼钢结构安装综合技术介绍
- 机械工程仪器学中可编程逻辑控制器介绍
- 交换机基础功能介绍
- 介绍造纸中段污水处理节能新设备鼓风式潜水曝气机
- 介绍一种新型空调器冷凝器利用冷凝水提高能效比
- 介绍一种新型沉排沙垫式软体排设计和施工工艺
- 某玻璃纤维增强水泥GRC轻质墙施工组织设计方案介绍
- 李家峡水电站厂房2×350t桥机主跨梁拉运技术介绍
- 嘉兴桐星水泥有限公司纯低温余热发电技术改造工程介绍
- 建筑工程质量管理与控制介绍(施工方)
- 建筑工程全穿插施工作业介绍讲义
- 建筑工程材料A级外墙外保温材料特点及施工方法介绍
- 基于无机械手圆盘式刀库卧式加工中心换刀系统
- 迅达中国部分高端电梯样板工程介绍
- 德国皮尔磁PILZ继电器
- 德国品牌锅炉有哪些
- 德国品牌暖气片那种品牌好
- 德国气动蝶阀有什么好推荐
- 德国墙纸哪个牌子好
- 德国燃气热水器AODIS怎么样
- 德国乳胶漆排名
- 德国乳胶漆品牌有哪些
- 德国萨姆特暖气片怎么样
- 德国三大电梯品牌是什么
- 德国三大系统门窗那3家
- 德国什么牌子小型发电机好
- 德国双立人刀具价格
- 德国丝吉利娅门窗五金如何
- 德国铁元红和绿区别
- 德国威乐水泵好
- 德国威乐水泵好用
- 德国威乐水泵价格高吗
- 德国威乐水泵价格上贵吗
- 德国威乐水泵质量怎么样
- 德国威能2016款地暖报价
- 德国威能地暖vaim如何使用
- 德国威能地暖管是pb管
- 德国威能地暖好
- 德国威能地暖价格是多少
- 德国维尔斯铝业的型材好吗
- 德国卫水宝具有哪些特点
- 德国卫浴品牌多有哪些
- 德国卫浴品牌哪个好
- 德国卫浴品牌有哪些