




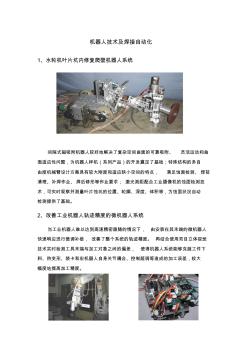
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、 灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点, 满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求; 激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下, 由安装在其末端的微机器人 快速响应进行微调补偿, 改善了整个系统的轨迹精度。 再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差, 使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3

1 机 器 人 实 验 报 告 册 制作人:叶翔 徐培嘉 陈琳 制作日期: 2012年 12 月 2 目录 1、中国机器人大赛双足竞步机器人比赛规则简述 ............3 2、双足竞步机器人构成简介 .......................3 3、功能及其改进方案简介 .........................4 4、设计与制作软件简介 ...........................4 5、比赛功能简介 .................................5 6、制作心得体会 .................................6 3 一、中国机器人大赛双足竞步机器人比赛规则简述 1、交叉足印竞步机器人: 结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面, 以箭头方向作为正面,是自主式脱线控制,用
热门知识
南京小原机器人焊钳精华知识
南京小原机器人焊钳-
话题: 地产家居dingjian426
-
话题: 工程造价tonychusky
最新知识
南京小原机器人焊钳-
话题: 地产家居zhengxiaogen
-
话题: 地产家居xiaolinger
南京小原机器人焊钳相关专题
- 考研中科院南京土壤所
- 造价南京园林规费
- 杭州和南京房价哪个贵
- 济南京式护栏价格
- 二次搬运费问题(南京)
- 南京别墅哪里好
- 南京大学游泳馆价格
- 南京地区人工挖孔桩价格
- 南京地铁10号线的建设历程
- 南京地铁有多少节车厢
- 在书香中沉睡——“川大河畔”高尚住宅小区景观设计
- 智能小区以太接入交换机SNMP代理设计与实现
- 影响免蒸养(压)粉煤灰小型空心砌块强度指标的因素
- 原结构面因存在高低不平或坡度而进行找平铺设的基层
- 有关水电站小开度甩负荷工况水击压力骤升问题
- 一体化预制泵站在小区污水泵站迁建工程中的应用
- 大跨度小横梁、小纵梁及桥面板现浇施工移动吊架
- 有关住宅小区内道设计和施工出现的问题和原因
- 云南省年内筹资24亿元确保中小学校舍安全工程建设
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计
- 应力释放率对超大断面小净距浅埋隧道的开挖影响
- 增建二线铁路线间距偏小地段石方爆破施工工艺
- 有关小型水库溢洪道设计的一些问题与解决对策的思考
- 原供应处仓库改造项目住宅小区岩土工程勘察投标文件
- 印尼/中国/联合国工发组织将联合举办小水电研讨会
- 中国中材国际工程股份有限公司(南京本部)招聘简章
- 工程岩体力学试验中动静对比在小湾水电工程中应用
- 南京小学建筑设计方案
- 南京小红山公园
- 南京小西湖
- 南京小高层投资估算
- 南京尧化门桑拿
- 南京居住区规划设计
- 南京屏面标签框报价
- 南京山水康桥居住小区
- 南京山水康桥居住小区案例分析
- 南京岩棉条
- 南京岱山保障房户型图
- 南京岱山保障房项目案例
- 南京岱山规划
- 南京川西集市火锅店
- 南京工业厂房设计
- 南京工业大学
- 南京工业大学创业园
- 南京工业大学城市规划
- 南京工业大学岩土工程
- 南京工业大学岩土工程研究所
- 南京工业大学江浦校区规划设计
- 南京工业大学钢筋混凝土单层厂房课程设计
- 南京工业用房建造成本
- 南京工业用盐
- 南京工大岩土工程有限公司
- 南京工大建设监理
- 南京工大监理
- 南京工程信息价
- 南京工程学院建筑学
- 南京工程学院输配电