




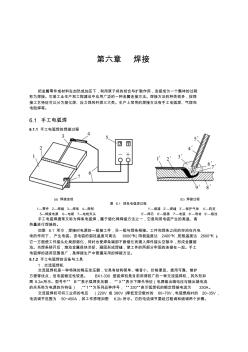
第六章 焊接 把金属零件或材料在加热或加压下,利用原子间的结合与扩散作用,连接成为一个整体的过程 称为焊接。它是工业生产和工程建设中应用广泛的一种金属连接方法。焊接方法的种类很多,按焊 接工艺特征可以分为熔化焊、压力焊和钎焊三大类。生产上常用的焊接方法有手工电弧焊、气焊和 电阻焊等。 6.1 手工电弧焊 6.1.1 手工电弧焊的焊接过程 (a) 焊接连线 (b) 焊接过程 图 6.1 焊条电弧焊过程 1—零件 2—焊缝 3—焊条 4—焊钳 1'—熔渣 2'—焊缝 3'—保护气体 4'—药皮 5—焊接电源 6—电缆 7—地线夹头 5'—焊芯 6'—熔滴 7'—电弧 8'—母材 9'—熔池 手工电弧焊通常又称为焊条电弧焊,属于熔化焊焊接方法之一,它是利用电弧产生的高温、高 热量进行焊接的。 如图 6.1 所示,焊接时电源的一极接工件,另一极与焊条相接。工件和焊条之间的空间在外电 场的作用下,产
摆动电弧焊缝跟踪技术的研究现状 摆动电弧焊缝跟踪技术的研究现状 2014-05-23 郭祖魁 lukasguo 摆动电弧焊缝跟踪技术的研究现状郭祖魁摘要 :随 着生产自动化和智能化技术的迅速发展,各种新技术在焊接 领域得到广泛的应用,焊接自动跟踪系统已成为焊接自动控 制研究领域中的一个重要内容。精确的焊缝跟踪可以快速实 现焊缝的精确定位,是保证焊接质量的关键,是实现焊接过 程自动化的重要研究方向。本文首先对弧焊机器人在工业中 的应用情况做了简要的介绍,然后较全面的介绍了在弧焊机 器人焊缝跟踪系统中常用到的传感器类型,重点论述了电弧 传感器的工作原理以及目前国内外电弧传感器的应用发展 和焊缝跟踪技术的研究现状。关键词 :电弧传感器 焊缝跟踪 弧焊机器人 The situation of swing arcseam tracking technicZukui GuoAbstract:Wit
热门知识
手工电弧焊焊缝余高-
话题: 工程造价130****2005
精华知识
手工电弧焊焊缝余高-
话题: 工程造价hongshizhu
-
话题: 工程造价ahdxzaojia
最新知识
手工电弧焊焊缝余高-
话题: 地产家居lobin_7816
-
话题: 工程造价zhangyn705
手工电弧焊焊缝余高相关专题
- 无醛乙醇和无水乙醇的区别
- 卡美尔净水机怎么按装
- 卡旺卡的净水系统是谁做的
- 开槽水曲柳饰面板怎么做
- 开船时为什么旁边喷水
- 卡特挖机大油门水温高
- 开饭店泔水怎么处理的
- 开放漆属于清水清
- 开个防水卷材厂生意好
- 开净水厂要注意什么
- 影响萘高效减水剂与普通硅酸盐水泥适应性的关键因素
- 亿阳信通中标环城高速公路晋江至石狮段机电工程项目
- 中国水电路桥武邵高速公路六标项目质量检验试验计划
- 基于超磁致伸缩效应的新型液压高速开关阀
- 怡达快速电梯SCORE项目获国际劳工组织高度评价
- 乍嘉苏高速公路改性沥青SMA—13面层试验段施工
- 引入PPP模式的高标准农田建设及财政支持体系创新
- 以工作过程为导向构建高职建筑工程技术专业课程体系
- 在书香中沉睡——“川大河畔”高尚住宅小区景观设计
- 应用型人才培养模式下高校机电工程综合实践改革探索
- 高效率PWM/PFM自动切换升压转换器的设计
- 智能照明系统在高校教学楼建筑节能改造中的应用
- 以污泥、建筑垃圾为基料制备高强轻质发泡环保陶瓷板
- 乍嘉苏高速公路改性沥青SMA-13面层试验段施工
- 高度集成化导航接收机系统射频电路的设计与实现
- 张涿高速南水北调干渠特大桥主桥边跨现浇段预压施工
- 中高职衔接培养园林技术专业技术技能人才途径的实践